
 课题组名称:中科云翼互联智造服务云平台创新团队 课题组名称:中科云翼互联智造服务云平台创新团队 |
||
| 课题组网址:http://www.cascloudwing.cn/ | ||
| 负责人:潘福成 | 工作单位:中国科学院沈阳自动化研究所 | 学科领域:智能制造 |
 课题组院地合作联络人员 课题组院地合作联络人员 |
|
| 姓 名:李歆 | 办公电话:024-83601269 |
| 手 机:13898896460 | E-mail:lixin@sia.cn |
| 科技处院地合作联络人员 |
|
| 姓 名:房灵申 | 办公电话:024-23970539 |
| 手 机:13840267512 | E-mail:lsfang@sia.cn |
中科云翼互联智造服务云平台是一个面向制造企业和工业APP软件开发的工业云平台,平台主要作用如下:
(1)可为集团型制造企业提供一套共享的管控软件对过程进行管理,促使管理模式的统一;
(2)降低企业IT运维成本,使得IT资源得到优化配置,避免重复部署及分散维护并能适应业务规模的变化;
(3)可为中小企业以云的方式提供廉价制造过程管控服务;
(4)便于企业难题的解决,对于制造过程的优化、分析难题可通过完善生态系统提供共研众创环境有利于问题的解决,为企业智能制造转型升级注入新动能。
主要研究方向包括:
工业互联网平台构建技术;
工业互联网边缘侧网关技术;
数字孪生与AR/VR技术;
云MES;
基于工业互联网的设备远程监控与故障分析;
设备健康状态体检及寿命预测;
大数据驱动的工艺过程参数优化;
基于大数据分析的质量缺陷分析。
1.云MES技术开发与产业化
研发团队基于多年在企业实施MES项目的技术积累,基于中科云翼互联智造服务云平台研制了面向中小装配类企业的云MES,其以较低的成本为中小企业提供生产过程精益化管控服务,其覆盖人、机、料、法、环等生产诸要素,充分利用“数字工厂建模”和“大数据分析”等核心服务,为MES系统管控功能的规范化集成与智能化分析提供基础支撑,实现全流程生产实时跟踪与过程追溯。利用工业云互联互通特性,实现计划、质量、物流等协同化管理,支撑互联制造新模式的应用。主要功能包括:工艺管理、计划管理、工单管理、质量管理、过程跟踪、绩效分析、看板管理等功能。

图1云MES运行实例
云MES系统已经在沈阳新松医疗科技股份有限公司、沈阳中之杰流体控制系统有限公司等企业示范应用,结果表明每家企业可降低信息化成本60%-70%,有效提升生产效率%15-36%,设备利用率提升8%-25%,质量提升5%-18%,成为企业向智能制造转型升级的重要抓手,创造了可观的经济与社会效益;着名的航天云网已选用中科云翼的云MES为企业用户提供服务,并签订853万元的合同,一次性采购了500个企业用户数的软件授权,扩大了成果的影响力和行业内的认可度。
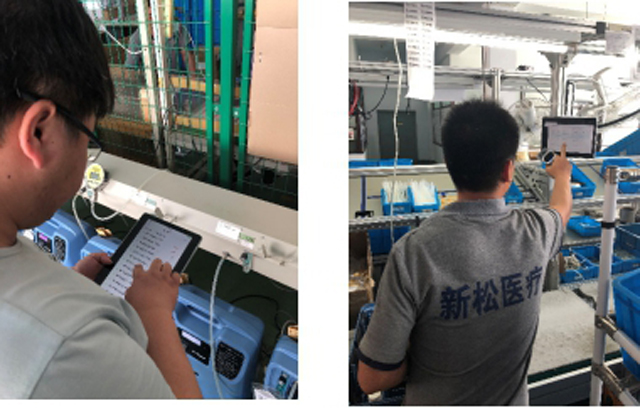
图2现场使用案例
2.大数据驱动的过程参数优化
针对中宽带加热炉控制系统、现场仪表和执行机构的现状,利用大数据平台及相关优化模型、算法,搭建加热炉燃烧过程优化大数据分析及应用平台。通过分析燃烧过程智能优化控制策略,应用于加热炉燃烧过程控制系统中,保持燃烧状态的实时优化控制,保证加热炉燃烧过程的高效、稳定和节能。
该系统的实施,可达成以下目标:
(1)优化钢坯加热温度曲线。实现加热全过程的操作指导和过程跟踪,通过学习出的最优化加热曲线指导整个加热流程,并通过深度学习预测算法对其他因素对加热过程的影响进行预判,从而修正加热曲线,给出实时温度设定建议,确保烧钢质量的稳定。
(2)节能减排。在保证烧钢质量一致性的基础上,通过对燃烧的优化控制,降低企业能耗,降低能耗3.2%,减少生产成本。
(3)在合理稳定的燃烧控制基础上,可以降低氧化烧损率,提高产品质量。
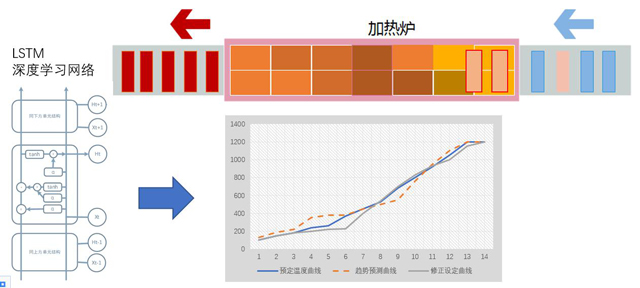
图3 加热炉跟踪模型
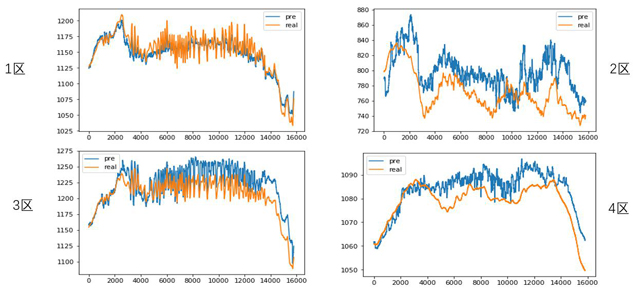
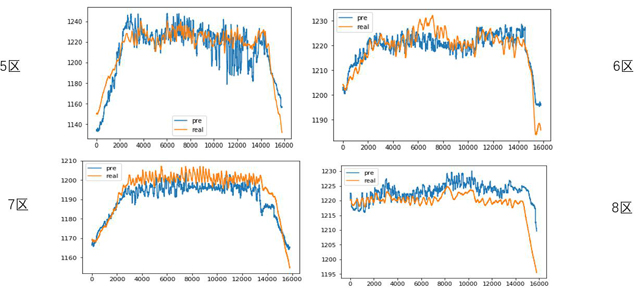
图4各区炉温预测效果图(12小时数据预测2.5小时趋势)
3.设备远程监控与故障分析
自主式水下机器人具有运动范围广、智能性强、安全可靠等优点,用于在水下完成海洋军事情报收集、侦察和搜救等重要任务,对科学研究的发展和军事安全的保障有着极大的促进作用。然而,随着技术的发展,需求的不断提升,自主式水下机器人的工作环境也越来越复杂,一旦发生事故 ,造成的财产损失都是巨大的。因此,保证水下机器人在航行时,特别是长时间航行时的安全尤为重要。要保障自主式水下机器人安全性、可靠性,就需要对AUV(Autonomous Underwater Vehicle,自主水下机器人)进行故障诊断。然而,由于AUV是一个十分复杂的非线性系统,各个模块之间具有强耦合性,需要对多维数据综合分析。同时,AUV系统具有退化多阶段特性,具有故障类型复杂、故障样本不完备的特点。
项目组针对此问题展开了相应的研究和软件开发,相继研发了基于深度学习的双RBM(Restricted Boltzmann Machines,受限玻尔兹曼机)故障诊断算法、基于多块信息提取的故障诊断算法,及集成相关算法的基于AUV运行数据的故障检测软件。
针对模块间的强耦合性问题,对多维数据综合分析,项目组研发了基于深度学习的双RBM故障诊断算法。双RBM故障诊断算法利用RBM网络综合多维数据、特征能量最低的特点分别提取AUV运行数据的故障特征及正常特征,并将提取到的特征进行反向重构,根据重构数据质量进行故障状态诊断。
软件功能介绍:
数据导入模块:数据文件的读入、关闭,数据变量特征的层次树展示,数据可视化、相关变量信息查看及保存,数据另存为等;
数据展示模块:单变量或多变量的数据折线图的绘制,保存等。
多块PCA模块:从本地或系统集成导入已有模型,分块信息提取、变化率信息及累积误差信息提取、中值滤波的去噪、贝叶斯推断的故障检测等;
双RBM模块:从本地或系统集成导入已有模型,数据标准化、数据分组、模型展示、网络综合等;
分析报告设置模块:生出特定模板的Word报告,针对不同的潜水器数据给出相应的潜水报告。
潜水器故障分析软件界面如下图所示:

图5 故障分析页面

图6 故障分析页面
提出的故障诊断算法对于实际数据中的各种故障类型都有非常好的效果,实现了多维数据的综合分析,达到了较高的准确率和较低的误报率、漏报率。开发的故障诊断软件,功能丰富,故障定位准确,且在测试中运行良好,为维护人员提供了可靠的维护指导。
附件下载: