
 课题组名称:康复机器人团队 课题组名称:康复机器人团队 |
||
| 课题组网址: | ||
| 负责人:赵新刚 | 工作单位:中国科学院沈阳自动化研究所 | 学科领域:机器人学与机器人技术 |
 课题组院地合作联络人员 课题组院地合作联络人员 |
|
| 姓 名:张道辉 | 办公电话: |
| 手 机:13080711130 | E-mail:zhangdaohui@sia.cn |
| 科技处院地合作联络人员 |
|
| 姓 名:房灵申 | 办公电话:024-23970539 |
| 手 机:13840267512 | E-mail:lsfang@sia.cn |
康复机器人团队一直致力于生物电信号处理、人机交互技术及康复机器人等方向的研究。自主设计开发了表明肌电信号采集传感器,肌电信号采集分析软件系统,并开发了上肢肌电假肢、肌电假手、肌电鼠标等多套人机交互实验平台。在分析人的手指骨骼、关节及手指运动的基础上,设计开发了面向残疾人实用的五指假肢手;为提高手部功能,设计开发了单指具有2个主动自由度的五指假肢手,每个手指自由度由电机驱动,能执行多种类人手的动作。研发了多套康复机器人系统平台,包括上肢镜像康复系统、七自由度上肢康复系统、下肢外骨骼助力系统、外骨骼康复手和踝关节康复系统等,积累了丰富的康复机器人设计与开发经验。
下面重点介绍外骨骼康复手和踝关节康复系统。
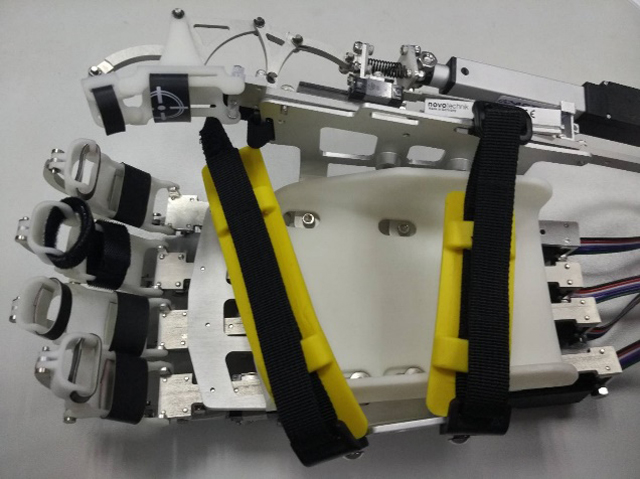
外骨骼康复手
1、简介
肢体运动障碍是脑卒中患者的常见后遗症,严重影响患者生活质量。现有人工康复方式效率低、成本高,因此,团队开展外骨骼康复手研究,通过康复运动帮助患者重新学习肢体运动控制技能,恢复建立脑到肌肉的正确的神经通路。主要包括两个方面的研究:1)基于柔性驱动器,从机构上保证患者不会受到伤害。2)智能化图形交互环境,患者可实时基于表面肌电信号控制康复手,实现患者自我康复操作。开发的机器人系统将在医院康复中心进行康复实验与评估。本系统以柔性驱动的康复理念为指导建立机器人辅助康复系统,引领机器人辅助康复技术及康复产品的发展。

坐式(左)与卧式(右)踝关节康复系统
2、主要用途
外骨骼康复手可用于脑卒中等神经损伤患者在康复中心或在家中进行康复治疗,提供更智能化、更高效康复训练服务。康复模式包括:
1)被动训练,机器人系统辅助患者瘫痪手指进行被动康复训练,防止挛缩和粘连,改善肢体血液循环,防止或消除肢体肿胀以及恢复和维持关节的正常活动范围;
2)主动训练,患者基于表面肌电信号控制康复手,恢复肌肉力度和对肌肉的控制能力;
3)主被动结合,康复训练后期,患者患者在外力协助下完成设定的运动学目标,增进关节运动的协调性和保证动作的准确性;
4)采用安全力控制策略,确保患者安全;
5)训练过程实时记录患者sEMG,实时评估患者康复状况,辅助医生/患者做出康复决策。
3、性能指标
康复设备功能:
(1)可以基于表面肌电信号,并控制外骨骼康复手人带动患侧做运动。同时为患者实时显示虚拟运动画面,达到刺激患者皮层,重建正确的脑神经通路的作用。
(2)可以支撑病人的手部重量,可辅助患者手指运动,且范围和速度均由患者主动控制,符合患者主动康复原理;这种带有辅助力的神经肌肉功能训练可以有效地提高神经对肌肉的支配和控制能力,提高肌肉的募集能力和协调性,从而提高患者上手指的运动功能。
(3)外骨骼康复手同时具有连续被动运动功能。每个关节可按照预先设定好的角度和速度,进行持续的被动运动。主要用于防治制动引起的关节挛缩,促进关节软骨、韧带和肌腱的修复,改善局部血液淋巴循环,促进肿胀、疼痛等症状的消除,使关节活动角度尽可能恢复到或超过损伤前的程度,最终使手部功能的恢复更早、更完善。
(4)智能化图形交互环境,患者可实时基于表面肌电信号控制外骨骼康复手,实现患者自我康复操作。
康复设备特点:
(1)每只手指的驱动部分均串联弹性元件,使之与直线电机组合,实现柔顺驱动,充分保证患者的安全性,舒适性。
(2)具有被动、主动、主被动等多种康复运动模式,不同模式之间切换方便,可独立存储多套治疗方案。
(3)按人类工程学设计,外骨骼康复手手掌部分充分吻合人手曲线,更具方便性和合理性。
(4)患者通过使用康复机器人参与治疗训练,能有效促进神经系统功能的重组。
康复设备适应症:
脑中风(脑神经异常)、脑外伤所致手指运动障碍,早期对患者姿位的摆放以及被动运动,可以有效地防止各种异常运动模式的形成和并发症的产生。
外骨骼康复手参数:
(1)近指端关节弯曲/伸展:;
(2)远指端关节弯曲/伸展:;
(3)近指端关节最大运动速度及最佳效率速度分别为:、;
(4)远指端关节最大运动速度及最佳效率速度分别为:、。
4、市场前景
传统的运动功能障碍改善治疗是采用手术的方法修复受损的神经系统,并通过术后的康复训练来改善运动功能。通过高强度、重复性的训练刺激皮质层重组并加强习得性应用来帮助患者重新学习运动控制已经得到了康复医学的验证。但是这种康复治疗方案不仅增加了理疗师的劳动强度同时也加重了患者的财务负担。应用康复医学概念并结合机器人技术研制外骨骼康复手,利用机械装置辅助手部关节及手指弯曲伸展运动,并通过控制系统实现运动康复策略促进手部功能恢复,将会克服传统方法的缺陷,为患者提供更好的康复体验,具有广阔的应用前景。
患者对于自动化程度较高的康复设备需求迫切,但我国具有高智能化程度的康复训练设备还处于空白状态。另外,从发达国家康复产业的发展来看,由于市场需求的拉动,家庭医疗器械即使在各行业普遍不景气的情况下,也能一枝独秀。本项目成果既适合康复中心进行批量患者康复使用也适合单个患者家庭康复使用,因此本项目的成果前景非常广阔,市场潜力巨大。
踝关节康复系统
1、简介
踝关节是人体负重最大的关节,也是人体下肢运动的关键关节,在人类的日常生活中起着关键作用。目前,由于人口老龄化的加重,交通工具的快速发展以及人们生活节奏的加快,踝关节的损伤在日常生活中较为常见。现有人工康复方式效率低、成本高,团队开展踝关节康复技术研究,通过康复运动帮助患者重新学习肢体运动控制技能,恢复建立脑到肌肉的正确的神经通路。从神经康复角度出发,开展了以下两个方面的研究:
1)基于关节扭矩传感器集成的踝关节康复机器人多模式控制方法,从控制上保证患者安全;
2)智能化图形交互环境,患者可实时基于表面肌电信号控制踝关节康复系统,增强患者主动参与度,实现患者自我康复操作。本系统以基于表面肌电信号的多模式控制方法的康复理念为指导建立踝关节康复系统,引领机器人辅助康复技术及康复产品的发展。
2、主要用途
踝关节康复系统可用于脑卒中等神经损伤患者在康复中心或在家中进行康复治疗,提供更智能化、更高效康复训练服务。功能包括:
1)基于被动控制模式,在线实时调节踝关节跖屈运动与背屈运动的极限位置、康复运动周期次数、速度参数、拉伸时间,让患者在踝关节康复设备的带的下进行往复康复运动,并且在极限位置上进行拉伸一定的时间;
2)基于主动多种控制模式,恢复神经意识对踝关节运动的准确控制;
3)采用穿戴式工作方式,直接驱动踝
暂无
附件下载: